PaLM-E: An Embodied Multimodal Language Model
Give a high-level overview of PaLM-E.
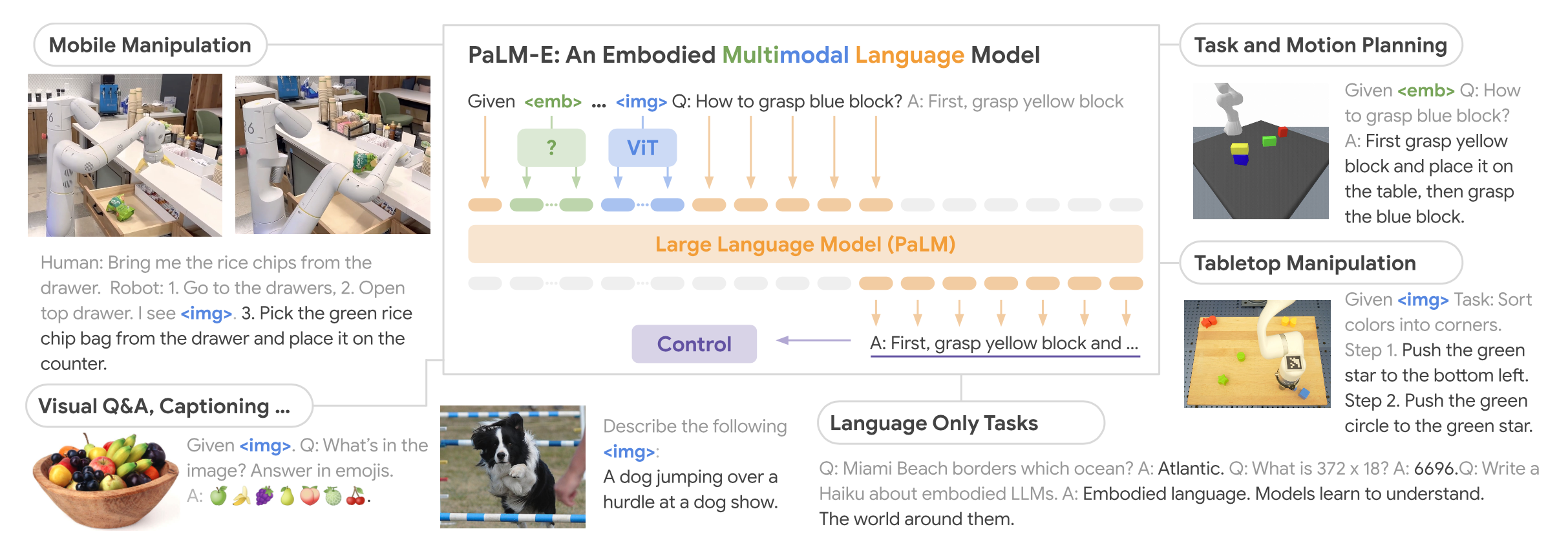
PaLM-E is an embodied multimodal language model: a pretrained decoder-only LLM (PaLM) extended so that continuous sensor observations (images, state vectors, 3D scene tokens) are injected directly into the language embedding space, letting the same model do VQA, captioning, and embodied planning.
The inputs are multi-modal sentences that interleave text with observation embeddings, and the outputs are autoregressive text completions — when used for control, those completions are high-level subgoals executed by separate low-level policies.
The largest variant (PaLM-E-562B) combines PaLM-540B with a 22B ViT, making it the largest reported vision-language model at the time.
How does PaLM-E inject continuous observations into a pretrained LLM?
An encoder maps each observation in observation space into a sequence of vectors in the LLM's language embedding space . These observation embeddings are interleaved with regular word-token embeddings to form a multi-modal sentence, which is then fed to the decoder-only LLM exactly like a normal token sequence.
Crucially, the observation embeddings are placed dynamically within the surrounding text (e.g. Q: What happened between <img 1> and <img 2>?) rather than at fixed positions, so the same model can handle an arbitrary number and ordering of observations per prompt.
What are the inputs and outputs of PaLM-E?
Input: a multi-modal sentence consisting of text tokens interleaved with one or more continuous observations (images, state vectors, or 3D scene representations), each encoded into the LLM's embedding space.
Output: text generated autoregressively by the decoder-only LLM. Depending on the task this text is:
- an answer (VQA, captioning), or
- a high-level plan / subgoal that a separate low-level policy translates into robot actions.
PaLM-E itself never emits low-level actions — it acts as a high-level policy that sequences low-level skills from a vocabulary the model infers from the training data and prompt.
Which input / scene representations does PaLM-E explore for encoding observations into the language embedding space?
Three encoders, each mapping into :
- State vectors: an MLP maps a scene-state vector (object poses, sizes, colors, …) into one embedding.
- Vision Transformer (ViT): produces per-patch embeddings in dimension . Since generally differs from the LLM dim , each embedding is projected through a learned affine transformation : .
- Object Scene Representation Transformer (OSRT): a 3D-aware neural scene representation that learns object-centric slot embeddings via a novel-view synthesis task, producing embeddings per scene.
What is the role of the learned affine projection in PaLM-E's ViT encoder?
The ViT outputs per-patch embeddings with dimensionality , which is not necessarily equal to the LLM's embedding dimension . A learned affine transformation projects each patch embedding into the language embedding space so it can be concatenated with word-token embeddings:
How does PaLM-E build object-centric visual encodings on top of a ViT?
Given ground-truth object instance masks , PaLM-E decomposes the ViT representation per object by masking the input image before encoding:
producing a separate set of embeddings for each object , which are then interleaved into the prompt.
This structured encoder isolates objects into distinct multimodal tokens, making it easier for the LLM to bind words (e.g. referring expressions) to the right visual entity.
Why does PaLM-E use OSRT as a scene encoder, and what advantage does it have over a plain ViT?
OSRT (Object Scene Representation Transformer) learns 3D-centric, object-slot neural scene representations in-domain via a novel-view synthesis objective. No ground-truth masks or segmentation labels are needed.
In PaLM-E's TAMP experiments, OSRT outperforms ViT-based encodings when the number of objects in the scene exceeds what was seen during training (i.e. better compositional generalisation), showing the value of 3D-aware, object-factored representations for embodied reasoning. Plain ViT features flatten the scene into patches and lose this structure.
How is PaLM-E actually used in a robot control loop?
PaLM-E is a high-level policy, not a motor controller:
- Given the current image and a long-horizon goal (e.g. "sort the blocks by colors into corners"), PaLM-E emits a language subgoal at ~1 Hz.
- A separate low-level policy (e.g. Lynch et al. 2022, RT-1) consumes that subgoal and outputs low-level robot actions at ~5 Hz.
- The subgoal must be drawn from a vocabulary of low-level skills; PaLM-E infers the available skills from the training data and prompt — no external filter constrains its output.
Because PaLM-E closes the loop by re-observing the scene and conditioning on its own previous text, it can replan and leverage the world knowledge stored in the LLM's weights.
A typical control prompt looks like: Human: <instruction> Robot: <step history>. I see <img>.
How does PaLM-E's multimodal injection differ from earlier VLMs like PaLI or Gato?
- vs. PaLI-style VLMs: PaLI inserts a fixed image prefix before the text tokens. PaLM-E instead dynamically interleaves observation embeddings anywhere within the text, so a prompt can contain multiple images, state vectors, and object-level tokens in any order.
- vs. Gato: Gato tokenises everything (including actions) into a discrete vocabulary, whereas PaLM-E keeps observations as continuous embeddings injected into an existing LLM's space and outputs text-level plans rather than low-level action tokens.
The upshot: PaLM-E reuses a frozen or lightly-tuned LLM's world knowledge, instead of training a multimodal transformer from scratch.
What are the smallest and largest variants of PaLM-E?
from 8B up to 562B